ロボトレース競技のマシンを作ってみる その11 マシンの紹介

こんにちは。そらです。
記事一覧のまとめ、ハードウェア、ファームウェアのデータはこちら。
マシンが完成してライントレースができるようになったので、マシンの紹介をしたいと思います。
マシンの基本情報について ...
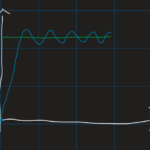
ロボトレース競技のマシンを作ってみる その10 フィードバック制御(P制御)について考える
こんにちは。そらです。
記事一覧のまとめ、ハードウェア、ファームウェアのデータはこちら。
ハードウェアに関しては改造をそれなりにしたので、データを確認後プッシュしたいと思います。
タイトルの通りP制 ...
ロボトレース競技のマシンを作ってみる その9 センサの使い方を考える
こんにちは。そらです。
記事一覧のまとめ、ハードウェア、ファームウェアのデータはこちら。
はんだ付けまで終わって、回路周りの確認をしていたらセンサ回路を変えようとするところまで検討しました。今回は、センサの使い ...
ロボトレース競技のマシンを作ってみる その8 はんだづけをする
こんにちは。そらです。
記事一覧のまとめ、ハードウェア、ファームウェアのデータはこちら。
基板が届いた、電子部品が届いたということは、はんだ付けをして動作確認をすることができます。今回は、私がはんだづけをすると ...
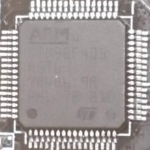
ロボトレース競技のマシンを作ってみる その7 STM32の周辺機能を実装する(MA700とSPI通信)
こんにちは。そらです。
ロボトレマシンのマイコンのペリフェラルの実装をしていきたいと思います。実装を行うのは、SPI、ADC(DMA,Single)、TIM(PWM,Interrupt),GPIO(Input,Output ...
ロボトレース競技のマシンを作ってみる まとめ(+データ公開)
こんにちは。そらです。
この記事には、ロボトレ競技のマシンを作ってみるのまとめたリンクとデータの公開データのリンクをまとめます。
データ公開について過去に製作したマイクロマウスやブレッドボード等を用いてファーム ...
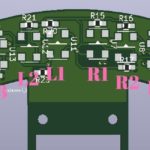
ロボトレース競技のマシンを作ってみる その6 センサ基板のアートワーク編
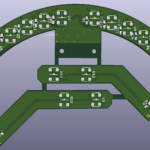
こんにちは。そらです。
記事一覧のまとめ、ハードウェア、ファームウェアのデータはこちら。
前回、メイン基板のアートワークが完了しました。今回は、センサ基板の回路設計、アートワークをしていきたいと思います。
ロボトレース競技のマシンを作ってみる その5 メイン基板のアートワーク編
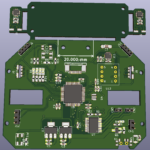
こんにちは。そらです。
記事一覧のまとめ、ハードウェア、ファームウェアのデータはこちら。
前回の3DCADの設計も終了したので、回路設計に入りました。その2のメイン基板の回路設計では、マイコンのピン設定の決定な ...
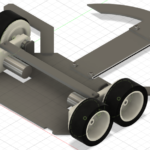
ロボトレース競技のマシンを作ってみる その4 3DCAD設計編
こんにちは。そらです。
来月でこのブログが一周年を迎えますが、4日間連続更新は初めてかもしれません。このシリーズが第何回まで続くのかは決まっていないので、どこまで続くのか楽しみです。
記事一覧のまとめ、ハードウ ...
ロボトレース競技のマシンを作ってみる その3 ハードウェア設計(2次元CAD編)
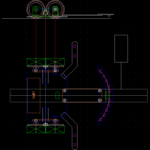
こんにちは。そらです。
記事一覧のまとめ、ハードウェア、ファームウェアのデータはこちら。
今後の情勢によりますが、現状予想できることとして5月以降はとにかく忙しくなりそうです。したがって、4月中にハードウェアの ...