ロボトレース競技のマシンを作ってみる その6 センサ基板のアートワーク編
こんにちは。そらです。
記事一覧のまとめ、ハードウェア、ファームウェアのデータはこちら。

前回、メイン基板のアートワークが完了しました。今回は、センサ基板の回路設計、アートワークをしていきたいと思います。
回路設計編
使用部品について
今回ラインセンサとして使用するセンサは、GP2S700HCPです。GP2S700HCPは表面実装部品で赤外線LEDとフォトトランジスタが内蔵されているセンサです。
そのため、赤外線LEDのほうに電流の制限抵抗、フォトトランジスタのエミッタに電流を電圧に変換する用の抵抗をつけることで使用をしていくこととします。
回路図について
使用部品についてで書いた通り回路設計をしていきたいと思います。
ラインセンサ用の基板には、電源供給確認用のLEDを一つ設置して、マーカー用のセンサにはGPIOで制御することのできるLEDを設置しました。マーカーを読んだときに点灯またはマーカーを読んだときに消灯のどちらかの方法で使用をしたいなぁと考えています。ブザーを積んでいないのでブザー替わりにする予定です。
ブザーを積まなかった理由は値段と過去にブザーを鳴らしたときにノイズが大きく乗るという現象に悩まされたことがあるためです。当時はGNDラインにモータードライバのパワーGNDを接続していたり、ベタGNDに浮島があったりといろいろと酷いアートワークだったのでそちらのせいでノイズが乗りやすくなっていた可能性が高いですが・・・。
回路図は以下の通りです。

PDF : rokisi_sensor
フラットケーブルでメイン基板とラインセンサ基板をまっすぐつなぐために、コネクタの順番が反対になっています。
アートワークについて
注意した点
特に注意した点は、赤外線LEDが進行方向の前方にくるようにしたことです。GP2S700HCPはIRLEDとフォトトランジスタが並んでいるため左右でラインを照らす場所を同じようにするためには縦に設置する必要があります。また、今回はパルス発光をしないため、IRLEDに流す電流は定格の半分程度にする予定です。そのため、フォトトランジスタを前に設置してしまうと赤外線が前に積んであるときに比べて光が弱くなり値のS/Nが落ちてしまうことが予想できます。
そんなこんなで、センサの向きに注意をしました。もう一つ注意した点は配置する場所です。これは、2次元CADで場所を決定しておいてKiCadの配置のときに四角形の中心に円をついたデータを用意しておいてその上に配置をするという方法で事なきを得ました。
アートワークについて
アートワークは次のようになりました。マーカーセンサ基板は、上面にGND以外の配線をして裏面にベタGNDにしています。
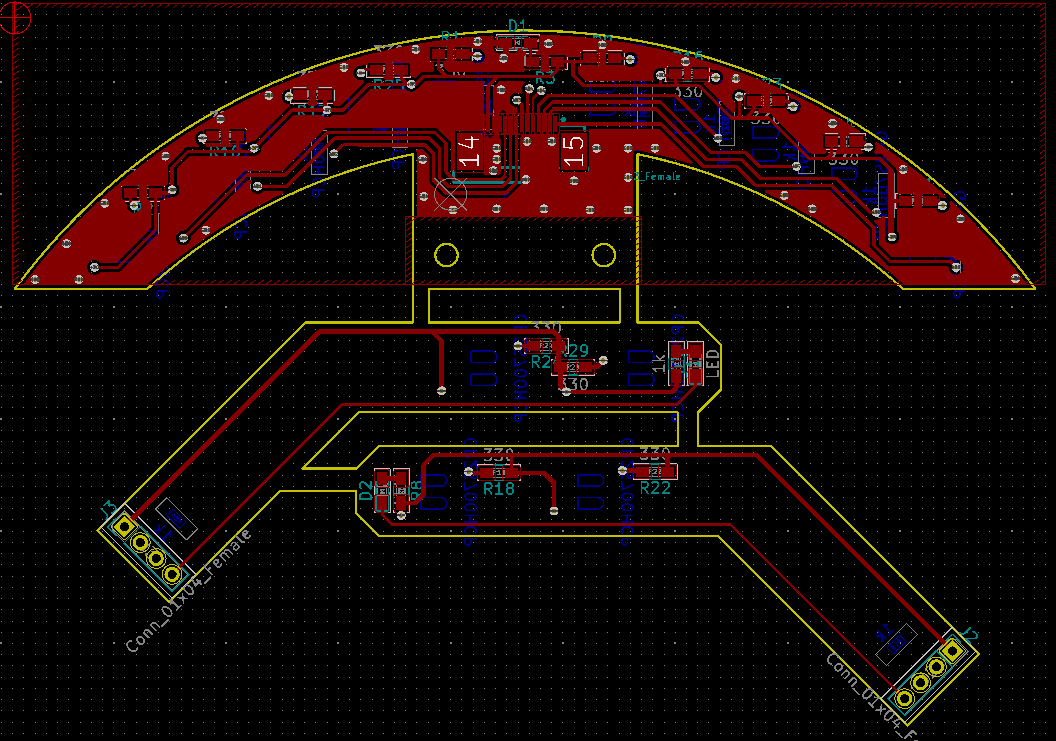

裏面は比較的綺麗にベタGNDを設定することができました。センサ基板の左側に少し無理やり感を感じますが気にしないでいただければと思います。
さいごに
既にモーター(4月1日には追跡可能になっていた)、基板(近日中に到着予定)、電子部品(近日中に到着予定)、3Dプリンタ(受け取り済み)、駆動用の平ギア(Misumiで発注をしていただいた知り合いのところに到着済みらしい)、ピニオンギア(kkpmo、頼んでから10日以上たっている)という感じなので、届くのを待つのみ!って感じです。
また、STM32の周辺機能の実装は8割がた完了したので、はんだ付けをして周辺機能の動作確認をしたらハードウェアの機械部品待ちって感じになりそうです。