ロボトレース競技のマシンを作ってみる その11 マシンの紹介
こんにちは。そらです。
記事一覧のまとめ、ハードウェア、ファームウェアのデータはこちら。

マシンが完成してライントレースができるようになったので、マシンの紹介をしたいと思います。
マシンの基本情報について
写真
色々な角度から写真を撮ってみました。背景はくりぬいています。

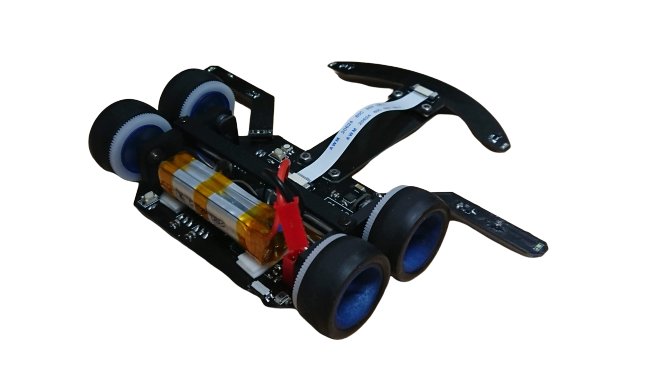
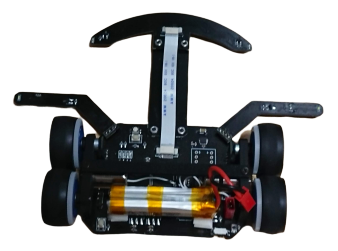
黒い機体になりました。
軽量化には成功したといえるレベルになりました。なんと80gを切りました。

詳細情報
マイクロマウスの大会のエントリーシートに記載する内容についてまとめておこうと思います。
| 機体名 | ロキシ(仮) |
| サイズ | W : 110 D : 130 H : 35 |
| 質量 | 77.05g |
| 駆動モーター | 8520(ドローン用コアレスモーター) |
| CPU | STM32F405RGT 160Mhz(メインクロック)で使用 |
| IMU | MPU-6500 |
| エンコーダ | MA700 + φ4径方向 厚み2mmの磁石 |
| センサ | GP2S700HSP * 16(ラインセンサ:12,サイドセンサ:4) |
| モーターマウント | DMM アクリル(xtream mode) |
| ギア | 駆動: Misumi メカニカル加工品 ポリアセタール M0.3 80歯厚み2mm,内径18mm ピニオン : kkpmo M0.3 20歯,内径1mm |
つい最近、DMM.makeでアクリルの新しいやつがプレリリースするとの報がありました。アクリルが残るだけでなくさらなる精度のアップが期待できるそう。嬉しいですね。AGILISTも試してみましたがアクリルに比べると精度が低いというのが感想です。
走行動画
探索走行
ラインセンサとマーカーセンサを使用して走行しています。
最短走行のために各セクションの直径の計算はできた。
あとは、速度設定、最短走行のソフトをかくだけ。探索速度はこの速度でいこう。
ターンでおかしくなるなぁと思っていたらギアがずれて空転しているときがあることがわかった。 pic.twitter.com/u36N0POJsx— そら (@sora_siro1) May 17, 2020
加減速走行
コースの解析をして台形加速をしながら走行しています。現在は、ラインセンサで追従をさせながら走行しています。
よくなったのか? pic.twitter.com/t7ppcVyI4t
— そら (@sora_siro1) May 21, 2020
ハードウェアの変更点について
コンセプトの比較
ロボトレマシンを作ってみるシリーズのその1 コンセプト、その2 メイン基板の回路設計などと比較しながら確認をしていきたいと思います。
コンセプトで提示した部品のうちL3GD20だけ使うことをやめました。加速度センサがついていないことと、1.0gと重かったためです。スルーホールのはんだづけって難しいですね。
回路設計の変化としては、電流計測用のICを使用することをやめました。強磁気のモーターの近くor磁気式エンコーダの下という場所に配置できそうだったので試してみました。電流計測をするセンサの近くで磁気があるものがあるとセンサのノイズがひどいことになっていました。よって、載せないことに決定しました。
他には、Lipo3Sの予定から2Sに変更しました。これについてはやらかし案件で書きます。
やらかし案件について
- 三端子レギュレータでやけどをする。
- アクリルのマウンターを割る
- はんだづけをミスる
三端子レギュレータでやけどをした理由はLipo3S(11.1)から5Vに落としているレギュレーターが熱くなっていることに気づかずマシンを持った瞬間にやっちゃいました。すぐに水で冷やしましたが5分程度で冷やすことをやめた結果、やけどが悪い方向に進みました。その日のうちに2Sのバッテリーパックを作って変更しました。
アクリルのマウンターを割るというのは、仮組中に机の上から落としたら割れました。やる気が失せました。
はんだづけをミスるというのは、とある素子の向きを間違えただけです。K型二本で外してすぐに直しましたが基板にダメージを与えてしまいました。
おわりに
やらかし案件が地味に心にダメージを与えてきました。やけどをした場所が左手の人差し指の腹だったため不便な生活を少しの間強要されたので、いままでのやらかし案件の中ではTOP3くらいでダメージを負いました。
走行動画のところで紹介しましたが、マシンが届く前に考えていたアルゴリズムで無事マーカーごとに保存をした区間情報から加減速走行ができたのでよしとします。次は、オドメトリデータからショートカットや加減速走行をできるようにすることが目標です。