ロボトレース競技のマシンを作ってみる その2 メイン基板の回路設計
こんにちは。そらです。
記事一覧のまとめ、ハードウェア、ファームウェアのデータはこちら。

前回はロボトレースロボットのコンセプトについてまとめました。ハードウェア設計、回路設計のどちらから入るか悩みましたがコンセプトについてのところで回路設計周りの仕様がほとんど決まったので回路設計からしていきたいと思います。
ハーフマウスやクラシックマウスよりも実装面積に余裕があることが考えられるため、回路設計から入ってもアートワークで部品が置けないということはないと考えています。
回路設計について
部品選定(電子部品編)
前回、回路部品の主要な部品の選定は過去に作成したマイクロマウスやその他の電子工作で使用したものなど私が抱えている在庫を使用していくということにしていました。基本的に抵抗やコンデンサのサイズは1608(0603)を使用することに決めました。理由としては、はんだづけが1005サイズよりは楽なことと、自宅に抵抗がそれなりの数あったためです1。
ほぼ確定の電子部品の主要部品は以下の通りです。
| MCU | STM32F405RGT |
| Motor Driver | TB6612FNG |
| Encoder | MA700 |
| Gyro Sensor | L3GD20 |
| Current IC | ACS711ELCTR-12AB-T |
| 3-terminal regulator | AZ1117-5.0, AZ1086-3.3 |
| Pch MOSFET(power switch) | SI2323DDS |
モーターの電流を計測するための電流計測ICを追加しました。電流を計測していろいろとできるようになればいいなぁと考えています。
ここには、書いていませんがセンサ基板とメイン基板の接続に使用するコネクタや配線をどうしようか検討中です。おすすめのものがあれば教えていただきたいです。よろしくお願いいたします。
回路図の設計
回路図の設計を行いました。回路図は以下の通りです。
*追記 電流センサーICの型番が間違えていました。ACS711ELCTR-12AB-Tを使用する予定です。
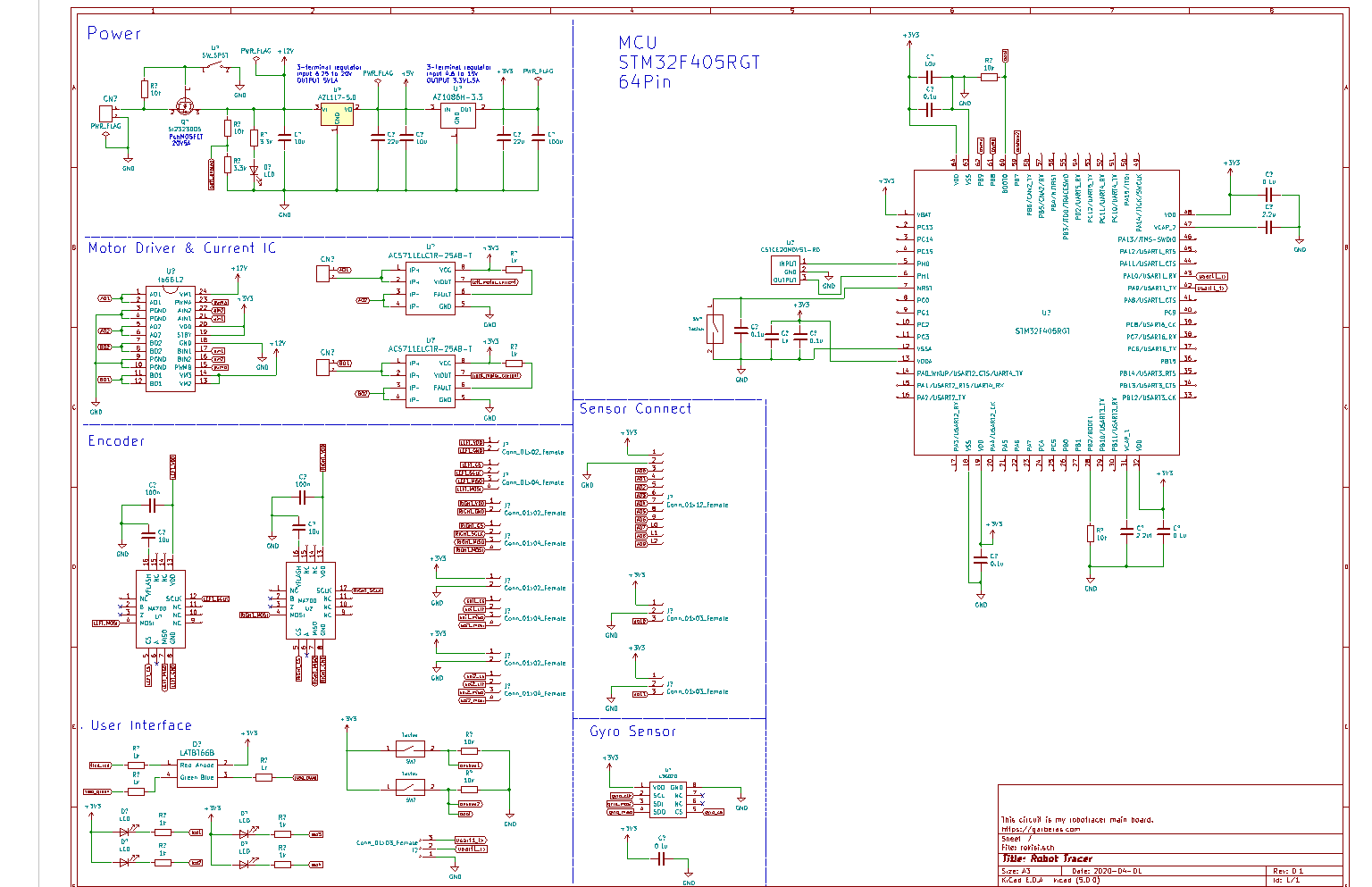
PDF版: トレーサー回路図
回路図を見ていただいた方はわかると思いますが、リファレンス番号やマイコンのピン設定等がしっかりと決まっていません。これらについては、ハードウェアの設計をして配線をする前にピン配置をしていこうと考えています。配線がクロスしたり、無駄に長くなることを防ぐためです。
また、レギュレータを用いて12Vから5Vに落としてから3.3Vラインを作るようにしています。これは、12Vから3.3Vに落とした場合レギュレータの発熱が大きくなってしまうことが予想されるためです。
SPIやPWM等の周辺機能はすべてのピンが対応しているわけではないため、STM32CubeMXとデータシートの両方を確認して、ピン数が足りていることはチェックをしてあります。
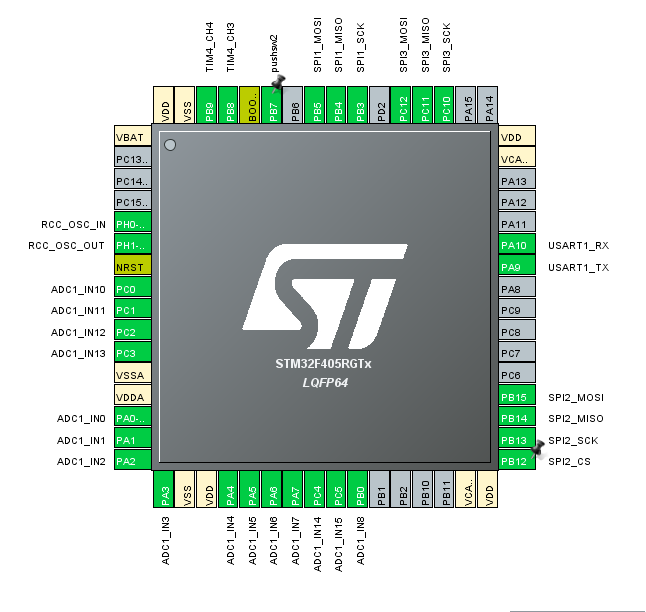
上記のようにSTM32CubeMX+データシートを軽く読んで確認しています。64ピンマイコンのGPIOピンはほとんど使用することになりそうです。データシートを読む理由としては、書き込みに対応しているポートやブート時のピン設定等を確認するためです。
このマシンでは、ブートモードはタクトスイッチを起動時に押しているときに入るという仕様にしました。2020年度のハーフマウスで実験をしてみたところ問題なく使えたためこの方法にします。
さいごに
回路設計について書きました。
Twitterにてとある方に、シリーズ物+納期ありのマゾプレイをしていると指摘されてしまいました?シリーズ物+納期ありはマゾプレイらしいです。納期は最短で2カ月後(マウス合宿)と考えると確かにヤバイなぁと思いました。
今のところマウス合宿に間に合わせる予定は・・・(皆様のご想像にお任せ致します)
ここから先は、ハードウェアの設計を完成させないと進まないのでハードウェアの設計に入っていきたいと思います。