ロボトレース競技のマシンを作ってみる その5 メイン基板のアートワーク編
こんにちは。そらです。
記事一覧のまとめ、ハードウェア、ファームウェアのデータはこちら。

前回の3DCADの設計も終了したので、回路設計に入りました。その2のメイン基板の回路設計では、マイコンのピン設定の決定などをしていませんでした。今回、kicadでフットプリントとの関連付けをしたり、ピンアサインを決定したりといったことを配置や配線をしなが決定をしていきました。
アートワークに関して
注意したこと
アートワークを行う上で注意したことは以下の通りです。
- ハードウェアの部品と干渉しないようにすること。(バッテリーの下にスイッチやLEDを配置しないなど)
- モータードライバのPGNDと信号ラインやアナログラインのSGNDをバッテリーで一点接地するようにすること。
- 配線がクロスしないようにすること。
- ビアを多用しないこと。
- ベタGNDで外周を覆うことができること。
- ベタGNDで浮島を作らないこと。
- 配線はできるだけ短く引くこと。
- 電源ラインや電流が流れるところの配線は太く引くこと。
配線の仕方一つでノイズがたくさん載ったり、ノイズを減らすことができたりします。私はマイクロマウス競技初年度にセンサーのノイズでとても苦しみました。ノイズ対策.comのサイトを参考にできるだけノイズを減らすことができるような配線や配置を心掛けました。
これもあって、ピン配置は機能のピンだけ先に割り振って決めておいて、後から配置を決定するといった配線方式で進めています。そうすることで、アートワークや配置を決めながら柔軟に考えることができると考えているためです。
そのため、最初に決定しているピンが、その2の回路設計編で回路図においてあるピンになります。
アートワーク完了後の回路図、画像
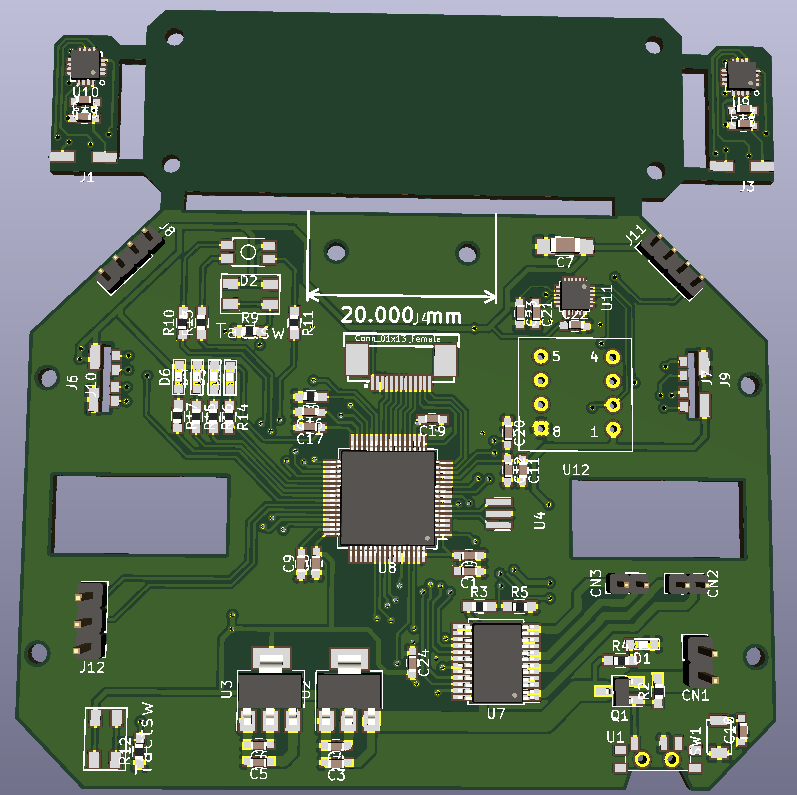
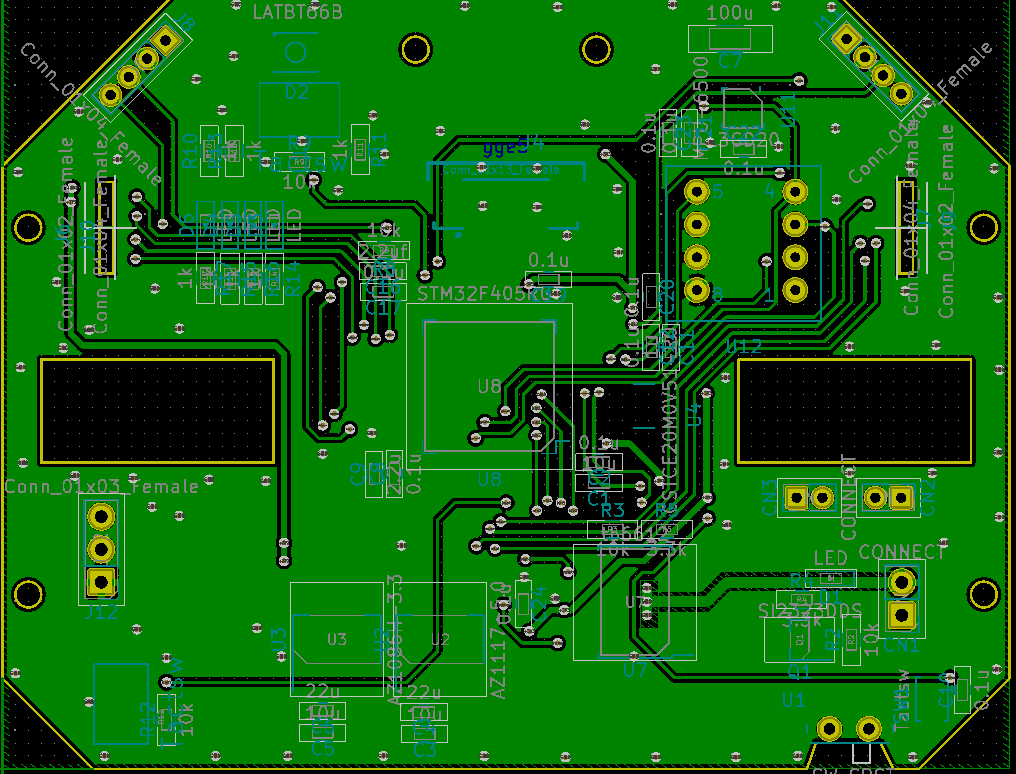
回路図とアートワークの画像は以下の通りです。ビアの数は、ベタGND強化用のビアを除いて83個でした。
回路図: ロボトレメイン基板の回路図完成版
3Dデータ

2DのFCu,Bcu

アートワーク中の配線の進みの流れ
Twitterで区切りがついたタイミングでツイートをしていたため、ここで追っていきたいと思います。
今回は、これをあのサイズに収める必要があると。
クラシックよりは楽なはずだからいけるでしょ(楽観) pic.twitter.com/SZ6WHxXLG8— そら (@sora_siro1) April 4, 2020
これは、余裕だと思ってしまっていたころの私です。完成したものを見ていただければわかると思いますがそこまで余裕はありませんでした。。基板サイズは60*78mmです。
電流センサだめだった。実際に手元にあったので現実のモーターの距離と同じくらいにして使ってみたところ、ノイズまみれになった。強磁気の近くでホールセンサーを使うこと自体がだめみたい?
— そら (@sora_siro1) April 5, 2020
先程触れませんでしたが、配線の都合上モーターの下のくりぬきをなくして電流ICを配置するくらいしか方法がなくなったので、手元に購入しておいたもので試してみたところノイズで電流計測ができる状態ではなかったため、電流ICを積むことを諦めました。無念。
載せるのは簡単だが、配線のことを考えると想像以上にしんどい。
電流ICを置く場所がモーターのほぼ真下くらいしかなかったため詰んだ。想像以上に余裕がない。 pic.twitter.com/QGOWiolyV6— そら (@sora_siro1) April 5, 2020
配置中です。マイコンのピン配置を考えながら配置をしています。この時は、なかなかいけるというところを見つけられず四苦八苦した記憶があります。
引けそうな雰囲気がでた。右のエンコーダへの配線が一番難しそう(L3GD20邪魔)。 pic.twitter.com/ypUuZ0BCQG
— そら (@sora_siro1) April 5, 2020
この時点で、SPIのピン配置やADポートのピン配置が8割以上決定して、それに伴いGPIOピンが決定しました。
ここまでは比較的満足のいく配線ができた。
まだまだ俺たちの戦いはこれからだ状態。 pic.twitter.com/rdILUGIW7f— そら (@sora_siro1) April 5, 2020
ピン配置が決まって部品がすべて置けたので配線をスタートしました。この基板では右エンコーダ用のSPI線とジャイロセンサ用のSPI線とモータードライバ用のPWM,GPIOピンを配線しているところが配線が密集すると考えられる、すなわち大変だと思われるところから配線をスタートしました。
私の個人的な意見ですが、配線を行う上で簡単なところから引いていくと、後から難しいところのしわ寄せで簡単なところも含めた全体的な変更をしなければならなくなり、余計な手間がかかるということがあるため難しいところを決定を最優先にしています。
電源ラインは、密集したところが引き終わった後に引きました。
配線完了。これからベタGNDにビアを打てば完成かな。
ビアの数はメイン基板で83個。まあまあかな? pic.twitter.com/6qM5zK2YMO— そら (@sora_siro1) April 6, 2020
先程の密集地帯を配線完了後は、特に難しいところはなく3.3Vラインをどうやって綺麗に通すかといったこだわりポイントにほとんど時間を使ったような気がします。密集地帯以外の配線を見ていただければわかると思いますがほとんどクロスしている配線がないことがわかると思います。配線を行う上でクロスした配線ほど、引きづらいということを覚えておくといいかもしれないです。
さいごに
メイン基板のアートワークが完了しました。あとは、センサー基板の回路図を引いてアートワークをすればハードウェアは完成になります。この調子でソフトウェアまで頑張っていきたいです。