マイクロマウスの磁気式エンコーダの設計をしてみる
マイクロマウス関連記事のまとめはこちら。

こんにちは。そらです。
昨年度、マイクロマウスの磁気式エンコーダにたくさん苦しめられたそらです。最終的にマシンを3台作り直すことでそれなりによくすることができました。今回の記事ではこんな感じで設計したらよくなったよということを書いていきたいと思います。
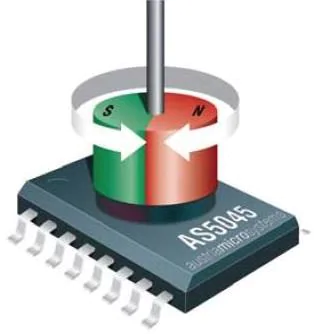
磁気式エンコーダの構成の概要は以下の図がわかりやすいかと思われます。
出展: AS5045-ASST Mouserの販売ページより
他にも内容について知りたいという方は、この記事の参考文献に参考として挙げさせていただいたマイクロマウス競技に参加されている方のブログが参考になると思います。
磁気式エンコーダの構成について
使用した素子と磁石
使用した素子や磁石等の購入先や型番を以下の表にまとめました。基板厚は0.6mmで作るということを前提にしています。
| 型番 | 購入先 | |
| IC | AS5047P(AMS) | Digikey |
| 磁石 | ネオジム磁石 径方向 φ4 * 2mm | NeoMag |
| ベアリング | DDL-310(NMB) | モノタロウ |
| シャフト | 1*6平行ピン(大陽ステンレススプリング) | モノタロウ |
| 鉄スペーサ | CF-502.5ZE | Wilco |
| モーター | MK06-4.5等(直径6mm長さ12mm) | RT ROBOT SHOP |
モーターマウント、ギア付きホイールの発注はDMMのアクリルエクストリームモードを使用しています。ただ、DMM.makeの3Dプリントサービスはアクリルは2020年度で終了するそうです。
設計について
私は、2DCADと3DCADの両方を使用して設計をしています。そのため、2DCADで上からみたずを書いて磁石とICとマウントの距離を決めたりした後に3DCADで3次元にデータに直しています。
とあるマイクロマウス競技参加者が集まった発表会の時に2DCADと3DCADの両方を使用して設計をしている人と聞いたときに0で、ほとんどの方が3DCADだけという結果がでました。この記事ではすべて3DCAD(fusion360)で設計をしていきたいと思います。
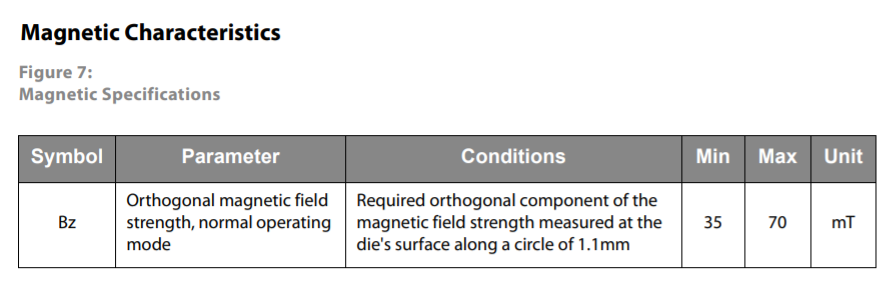
設計をするにあたって、磁石とセンサの距離をどのくらい離すのか、このセンサを使用するにあたって使用すべき大きさの磁石の径はいくつ?等を確認を行っていきたいと思います。例の通りデータシートを見ていきます。
出展: AS5047Pデータシートより
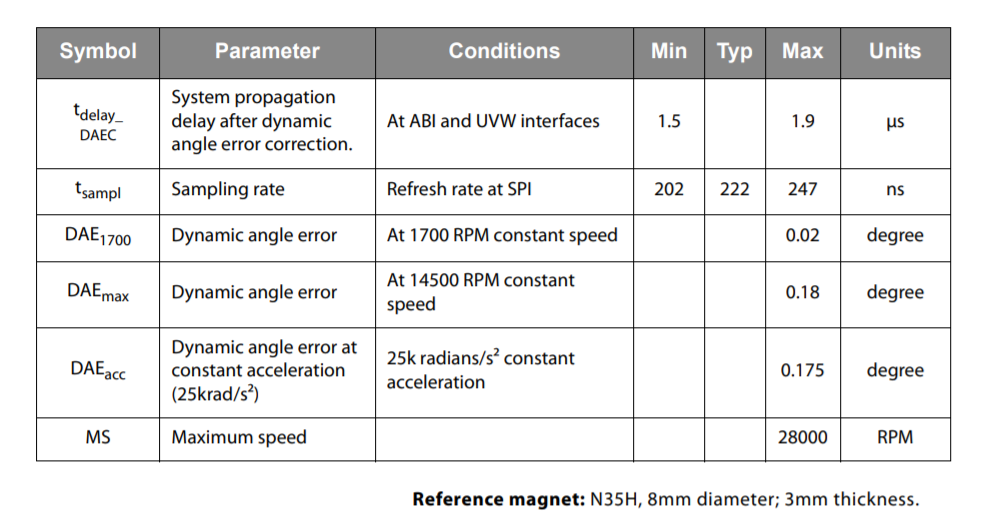
リファレンスとして使用されている磁石はN35Hなのでネオジム磁石の直径8mm厚み3mmの磁石であるそうです。NeoMagで直径8mm厚み3mmの磁石はなかったので近似としてN35Hの直径7mm厚み2mmを見ると480 mT、直径9mm厚み2mmのものが442 mTでした。
使用した素子等で紹介した直径4mm厚み2mmの磁石は340 mTとリファレンスよりも少し磁力が弱いということがわかります。したがって、2枚目の写真のICと磁石の距離を約1.1mm離すとありますが、鉄スペーサをつけて磁力をさらに弱くなることも含めて今回の設計では0.6mm程度離すということにしました1。
設計開始
Fusion360を開いてやっていきます。
設計は、モーターマウントの形状等に依存するためなんともいえないため設計の私の設計の指針を書いていきます。初めに、エンコーダ基板の固定に際してはんだ付けだけで固定を行うのか、基板に差し込む形にするのかという選択肢があります。この設計では基板に差し込む形で設計をしていきたいと思います。
マウントの厚さは3mmとして、設計における拘束は次のようになりました。
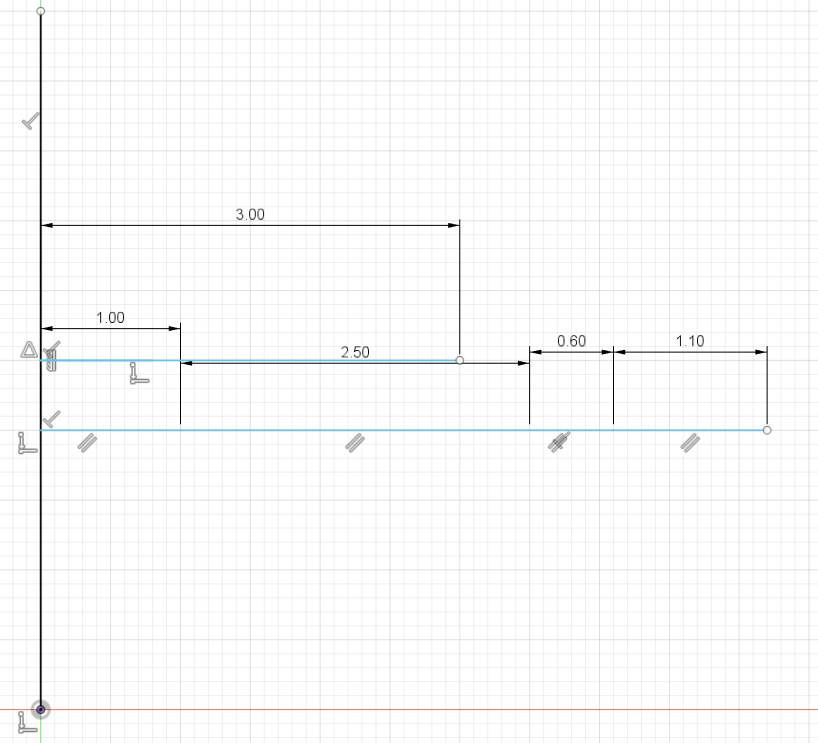
1mmのところは、以下の画像のところです。
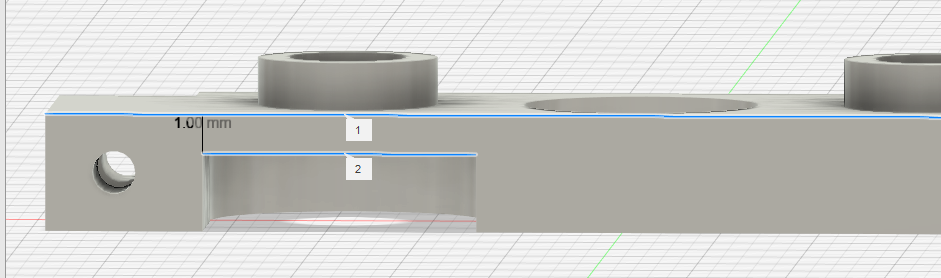
マウントの強度を保つことを考えています。2.5mmは磁石マウント、0.6mmは磁石とICを離すための距離、1.1mmはAS5047Pの厚みになります。
次にモーターマウントの設計を決めるために、磁石マントの設計をします。使用する磁石はφ4mm、鉄スペーサの内径はφ5.1mm、シャフトは1mmなので、
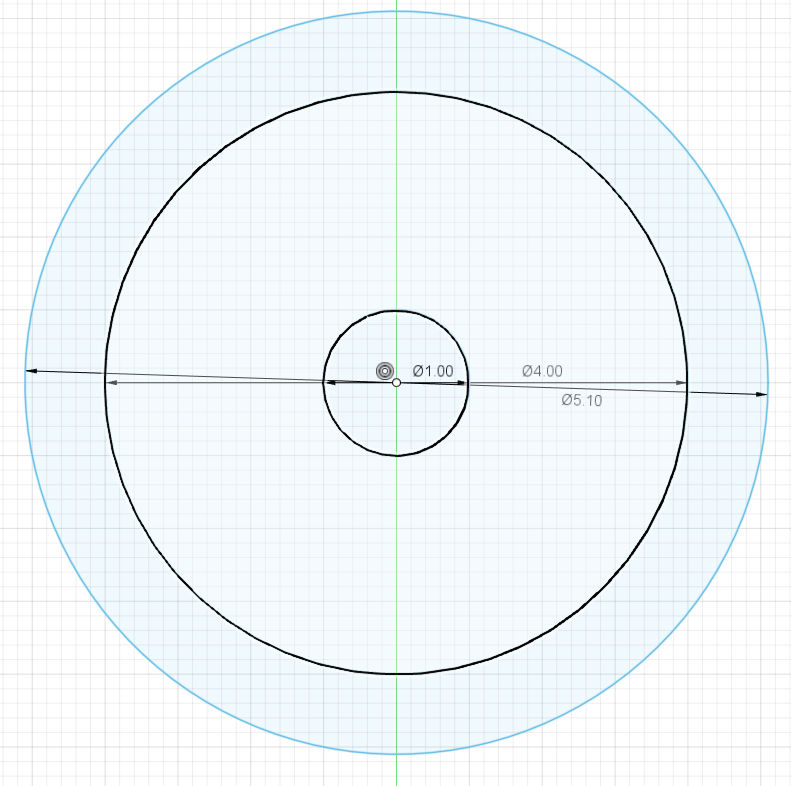
これを、3Dモデルにしました。作るときはこのようにすべて書いてからではかえって面倒かもしれません。

続いて、エンコーダの差し込み用の溝を作ります。基板厚が0.6mmのためクリアランスをとって長方形の横の長さは0.62mmでAS5047Pがちゃんと実装できる程度の基板サイズということで縦の長さは8mmで作ります。
磁気式エンコーダの設計はここまでになります。後は、モーターマウントの設計やマシン本体の設計に依存をします。2020年度のモーターマウントだけのアセンブリのデータを以下に示します。参考になれば幸いです。
さいごに
設計の方針を書いていきました。モーターマウントに依存をして、磁気式エンコーダ単体で設計をするわけではないということも磁気式エンコーダの設計が難しくなっている理由のひとつなのかなと思いながら書いていました。
参考文献
マイクロマウス競技に参加をしている方のブログ