マイクロマウス2019 マイクロマウス(クラシックサイズ)機体紹介
マイクロマウス関連記事のまとめはこちら。

2019年度クラシックサイズマイクロマウス「Novem」の情報をまとめました。
設計や部品選定の参考になれば幸いです。
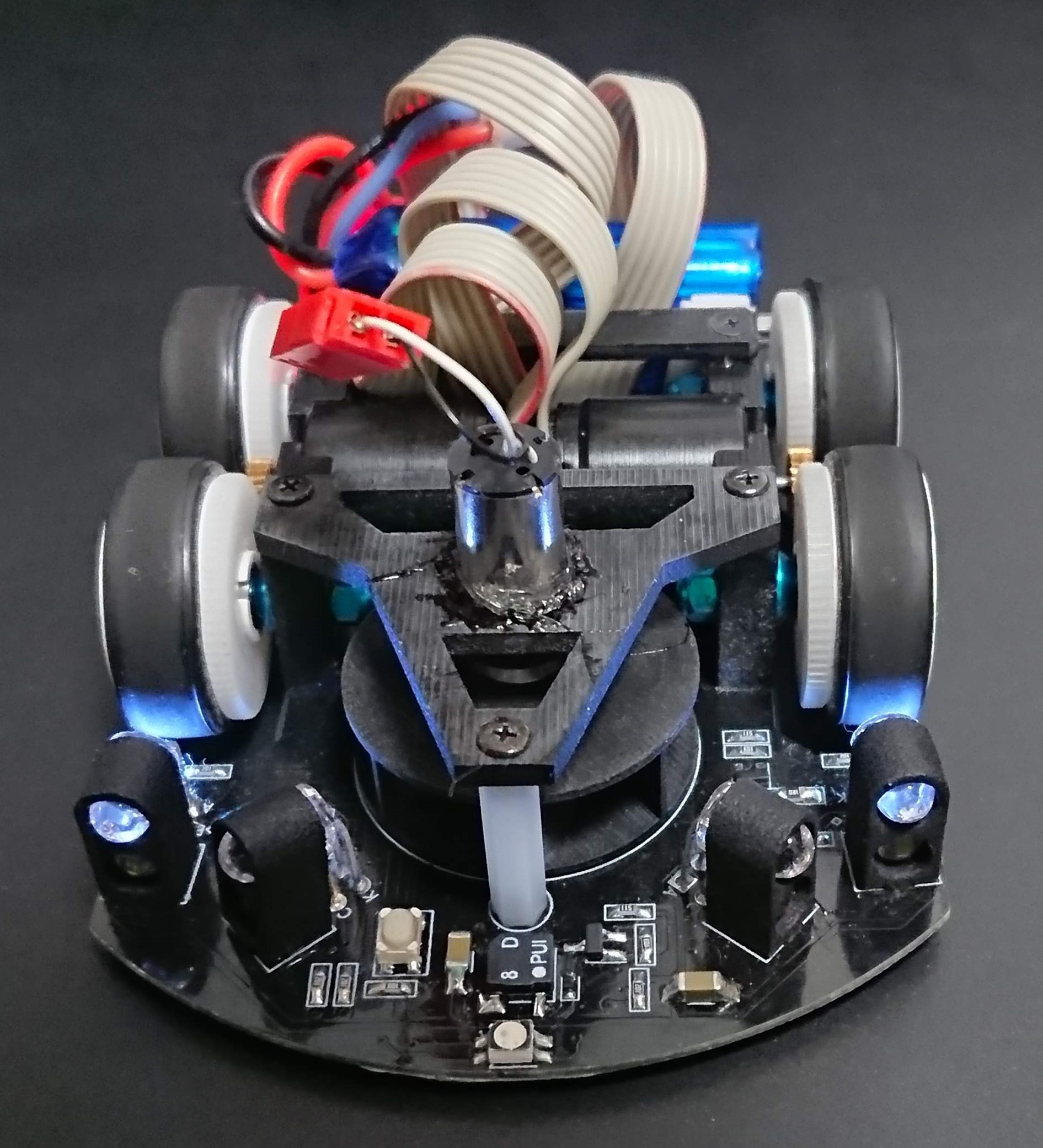
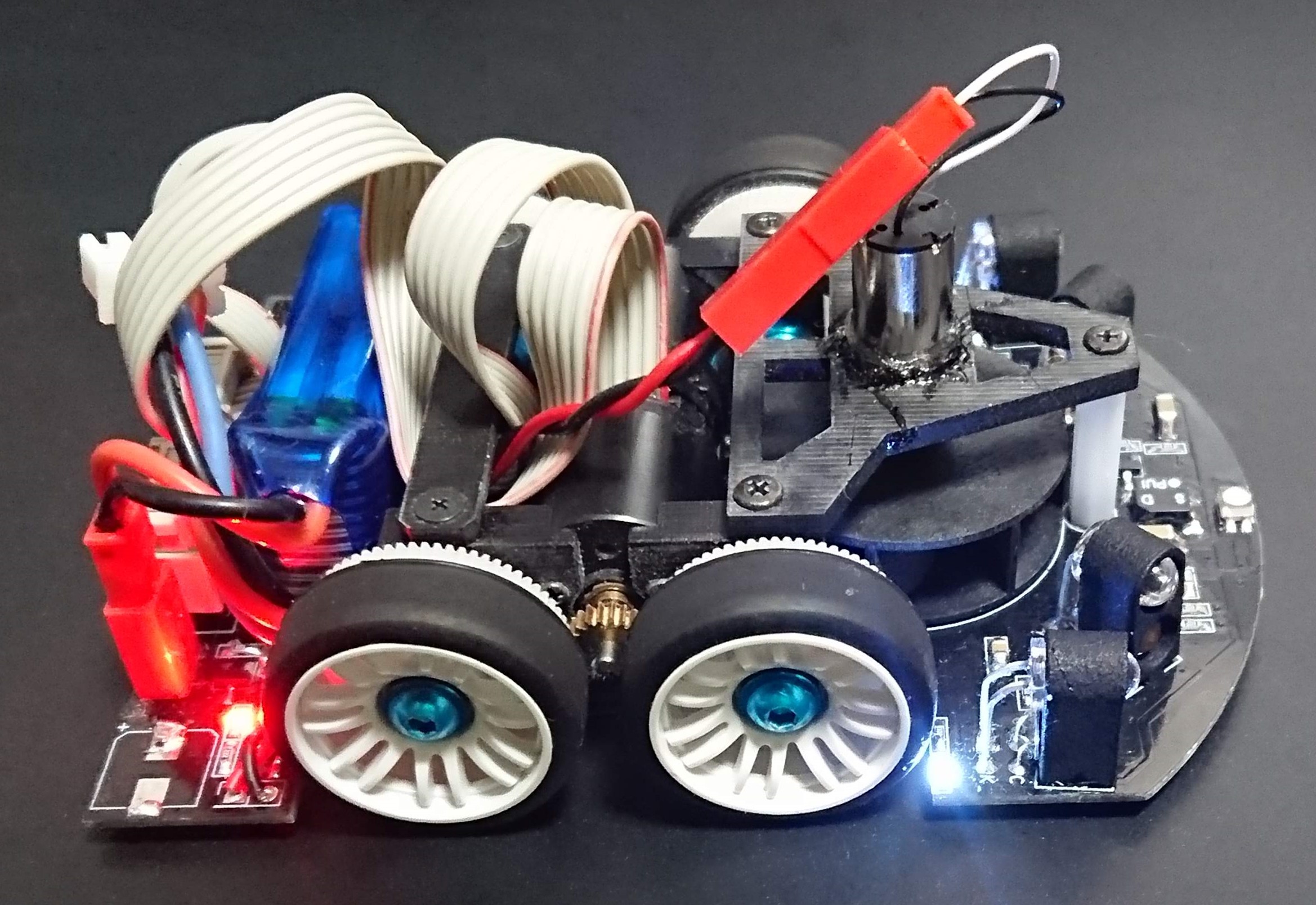
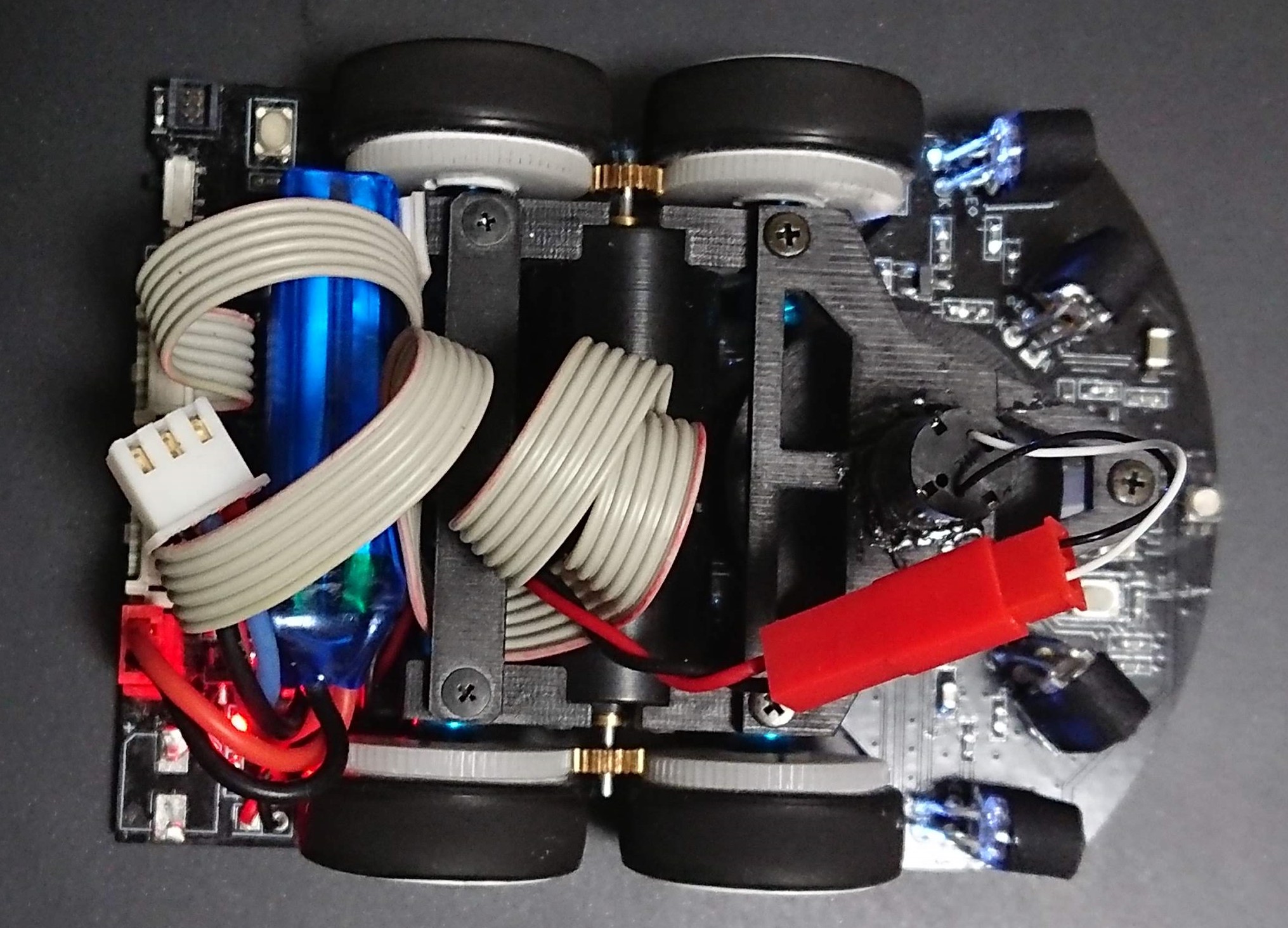
機体の写真
マシンの情報
テクニカルデータ
| 機体名 | Novem |
| 全長 | 100 mm |
| 幅 | 69 mm |
| 高さ | 50mm(配線含む) |
| 重量 | 110 g |
| マイコン | STM32F405RGT(64Pin) |
| モーター | Faulhaber 1717T003SR |
| 吸引モーター | Hyperion ブラシ DC モーター 8.5 * 20 mm |
| エンコーダ | IE2-512(各モーターに付属) |
| センサ | SFH4550 + ST-1KL3A |
| IMU | MPU 6500 |
| モータードライバ | TB6614FNG * 2 |
| バッテリー | Tahmaho 250mAh 2S |
| ギア | kkpmo M0.3 20T
ミスミ M0.3 70T |
設計データ
マシンの設計は、AR_CAD(2次元CAD),Kicad(電子回路CAD),Fusion360(3DCAD)を使用しました。
Fusion360の埋め込み機能があったので、設計データを貼り付けます。
設計思想としては、できるだけ横幅を狭くしたい、車高を低く受信の位置を中心にしたいということを目標にしました。
Fusion360で作成したCADデータは下記ブログカードから見ることができます。
マシンの特徴
変則四輪 + 吸引機構
昨年度の10月ごろに吸引のマシンを作りました。しかし、いくつものミスをしてしまいました。モータードライバのはんだ付けミス、結果としてモータードライバが燃える。なぜか、MPU-6500とマイコンのSPIの通信が安定しないということが起こり、開発を諦めました。
また、全日本大会の試走会の日、吸引なしのマシンはモーターが急に動かなくなるという事案に悩まされました。大会当日の朝にモータードライバを温めなおすことで動くようにはなりました。しかし、センサーの値がおかしくなり、左側の値が常に3.3Vの値に近い数値を変えすことになってしまいました。それにより、左壁を常に読んでしまう、中心を走ることができないという状況での出走になってしまいました。探索は迷路との相性で走ることができましたが最短走行はすべて失敗しました。
以上のことのリベンジを行うために変則四輪+吸引機構のマシンにしました。
壁センサにセンサマウントをつけている
クラッシュや、はんだ付けをする際に光軸の調整などをせずに、常に一定の場所を読めるようにしてみました。
前作から特に変更点はなしとしました。
モーターマウンタ、吸引ファンはDMMの3Dプリント(アクリル)で製作
精度はよかったです。
しかし、クラシックマイクロマウスの吸引マシンでアクリルは割れます。安易に精度がよいからといって使用することはお勧めしません。
マシンをクラッシュさせなければ使用しても大丈夫だと思います。ただし、吸引ファンのアクリルは基板にぶつかって割れた以外では割れていないので、吸引ファンをアクリルで作るのはありだと思います。
失敗点
モーターマウンタをアクリル
アクリルで作った結果、12月から5月の間で2回モーターマウンタが割れました。実は、ファンのマウンタも一度割れています。
この調子でいくと、シーズンであと2~3回は割れそうなので、コストを考えた際に板金に頼んだ方がよさそうなので板金に発注しました。
最初から板金で発注してしまえばよかったかなとか思ってます。1
私のものづくりの環境に工作機械が一切ないので、どうしてもお金で解決になってしまっています・・・。
アルミ電解コンデンサが外れる
吸引走行のV90をクラッシュしたときに吹っ飛びました。
一度付け直しをした記憶がありますが、直線の区画を間違えて、秒速3000 mm/secくらいで壁に突っ込んだ際に吹っ飛びました。
つけた場所が悪かったかもしれません。端につけるとどうしても衝撃に弱くなりますね。
今後の展望
前年度、大会会場で毎回マシンの調子が悪くなり、基板のはんだ付けをしていました。これがトラウマとなっているので、今年度はマシンを2台持って行って一台壊れても大丈夫という形を目標にしています。大会にマシンを持っていくことによって大会会場で焦ることを減らすことを目標にしています。日々の調整項目が増えてしまいますが、大会会場で走らないことの方が自分にとってはつらいと思っているため、このような方針で行うことに決めました。
さいごに
今年度は、クラシック競技(紹介したマシン+ラズベリーパイマウス)、マイクロマウス(旧ハーフサイズ)競技の両方のマシンを作成しています。
- クラシック、ハーフサイズのDCマシンで、全面探索、斜め走行の両方の成功
- ラズベリーパイマウスの探索走行成功
この2つを目標に頑張っていきます。