マイクロマウス2019 ハーフマウス機体紹介
マイクロマウス関連記事のまとめはこちら。

2019年度のハーフサイズマイクロマウス「Nihill」のデータをまとめました。
設計や部品選定の参考になれば幸いです。
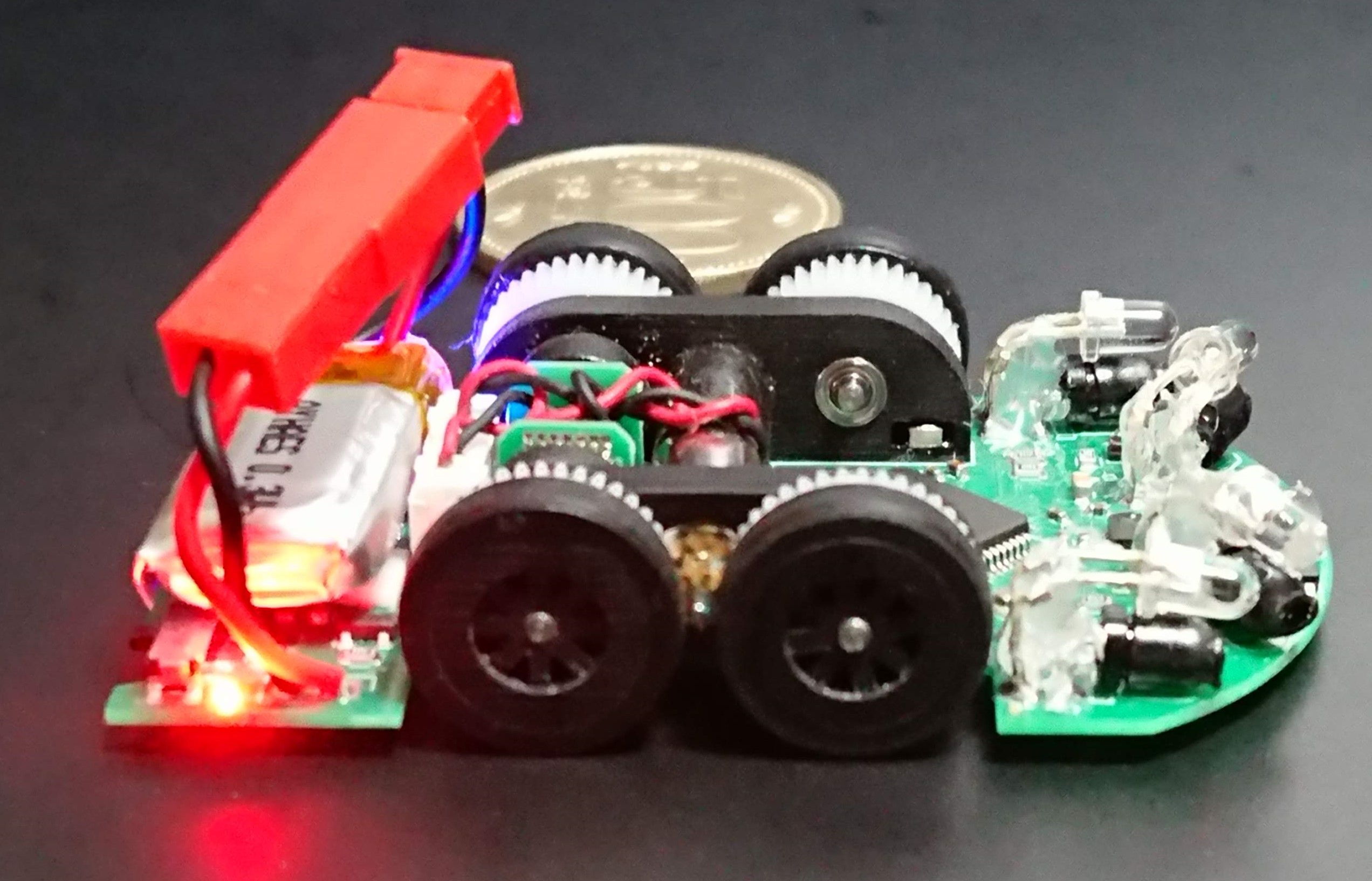
機体の写真
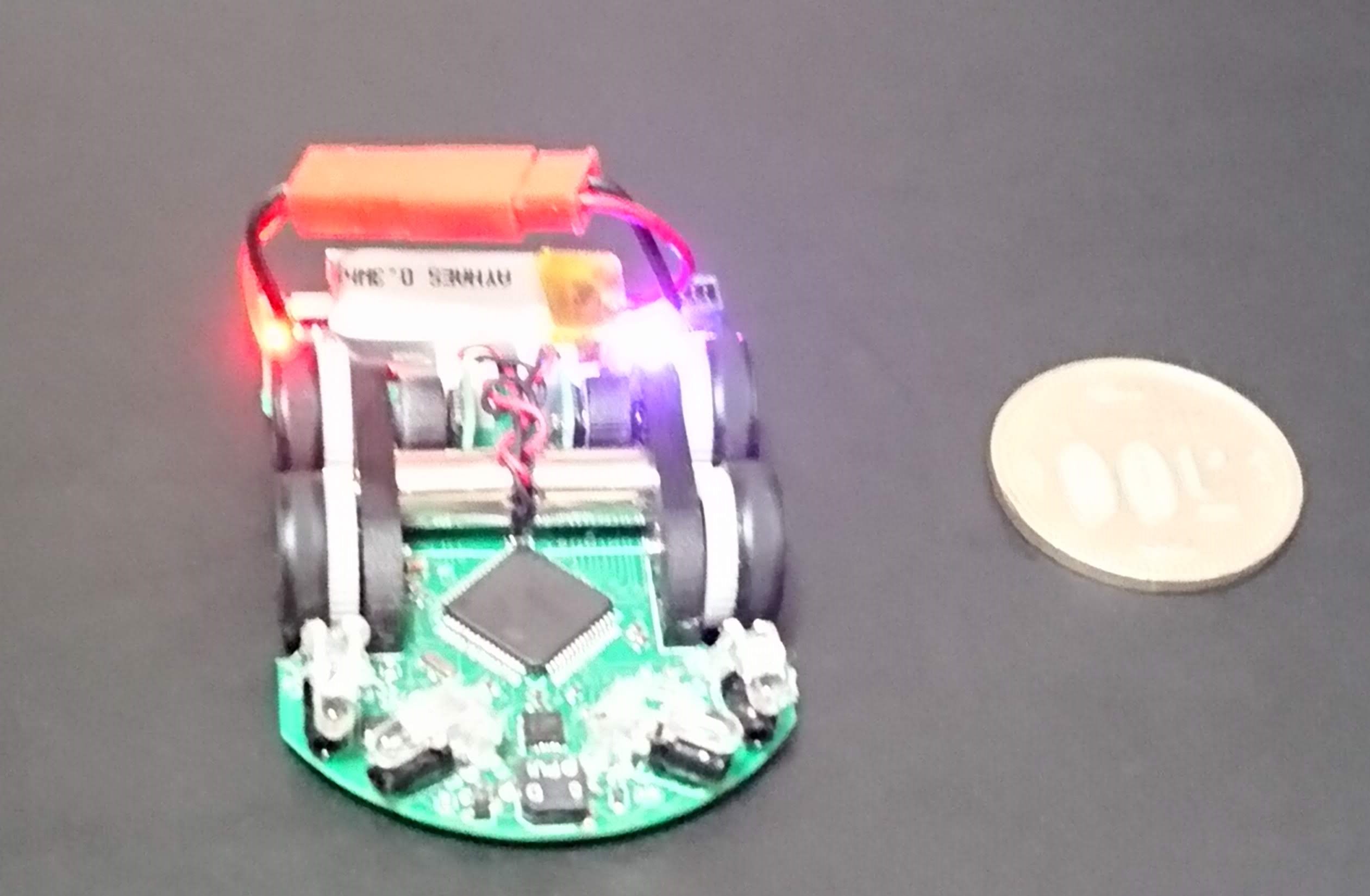

マシンの情報
テクニカルデータ
| 機体名 | Nihill |
| 全長 | 60 mm |
| 幅 | 39 mm |
| 高さ | 30mm(配線含む) |
| 重量 | 16 g(程度) |
| マイコン | STM32F405RGT(64Pin) |
| モーター | MK06-4.5 |
| エンコーダ | AS5047P |
| センサ | OSI5FU3A11C + LTR-4206E |
| IMU | MPU 6500 |
| モータードライバ | DRV8835 |
| バッテリー | Hyperion G5 70mAh |
| ギア | RTオリジナル商品 M0.3 9T
ミスミ M0.3 39T |
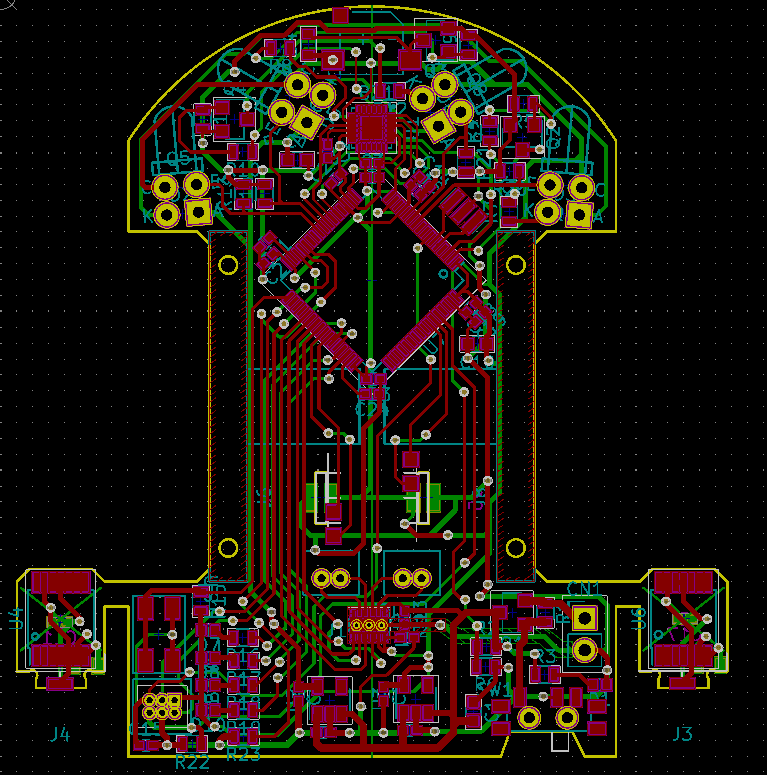
レイアウト
設計思想・改善点など
目標
- ちゃんと走るマシンの設計
- 磁気式エンコーダの設計し、磁気式エンコーダのノウハウをためること。
- ソフトウェアのコーティングの勉強
- 小さいマシンの回路レイアウトの練習
非吸引変則4輪マウス
吸引機構が回路設計上載せることが厳しいと考えていたことと、設計をしていたときにつくってみたいと思ったのが4輪だったのが主な理由です。
しかし、回転方向の調整や速度を上げた際にV90などの角速度追従が厳しかったので次につくるときは2輪(4輪)+吸引にしたいと考えています。
また、マシンの重心が後ろによっているため、加速中にマシンの前方が浮いて、加速時に滑りやすくなってしまいました。
そのほかにも、最短走行時に速度を上げていくと、ターン時のタイヤの接地が安定していないように感じます。
マイコンの選定について
48Pinと迷いましたが、48Pinのマイコンでははんだ付けの難易度が上がることを嫌い64Pinにしました。
ハーフサイズでも吸引をしなければ64Pin+スピーカーがのるという実績を作ることができました。
磁気式エンコーダ
設計当時に、AS5047PがDigiKeyで入手できたため選定しました。
SPI通信(アブソリュート),インクリメンタルの両方が使えましたが、現在使用しているプログラムとの差異を減らしたかったためインクリメンタルを使用しました。
とある方に指摘をしていただいたことになりますが、インクリメンタルよりもアブソリュートのほうが精度が高いそうです。次回、この素子を使用して設計をするときはSPI通信を使用する方法で設計をする予定です。
また、磁気式エンコーダから取得した値がぶれており移動平均や、ローパスフィルタをいれるなどを試してみました。
しかし、フィルタをいれると速度を上げた際に安定しなかったため、現在は生の値をそのまま使用しています。
その他
ギアは既製品に限るという考えのもと、駆動系のギヤはすべて既製品にしました。そのため、足回りのギヤのかみ合わせによる苦労はありませんでした。
タイヤのシャフトの固定がベアリングにさした結果抜けなくなったからそのままという状態です。現状は大きな問題がないのでこのままの状態で行く予定です。次回作では、固定方法をしっかり考える必要がありそうです。
さいごに
重心に問題があることによって速度を上げずらいという問題がありますが、ちゃんと走るマシンになったので設計における目標は達成できました。
自宅に9*9マスのコースを作ったので、調整をしっかりと行っていく予定です。
大会会場でお会いできることを楽しみにしています。