マイクロマウス(旧ハーフサイズ)設計まとめ(2020年)
マイクロマウス関連記事のまとめはこちら。

こんにちは。そらです。磁気式エンコーダの設計の記事を書くにあたって、マイクロマウス(旧ハーフサイズ)の設計のまとめの内容に触れていくため、先に設計のまとめを書いていきたいと思います。
コンセプト
目標
クラシックサイズと同様に吸引ファンを積み、機体の軽量化を行うことです。
吸引ファンを積んでいないマウスの重量が16gを超え、2019年度の全日本大会で出場した吸引ファンを積んだマシンは18gを超えていました。ほかのマイクロマウス競技に参加されている方の4輪で吸引機構のついていてるマシンは12g~16g程度のマシンが多いため、軽量化はできるということが実証されているため、自分のマシンも軽量化をしていきたいと思ったためです。
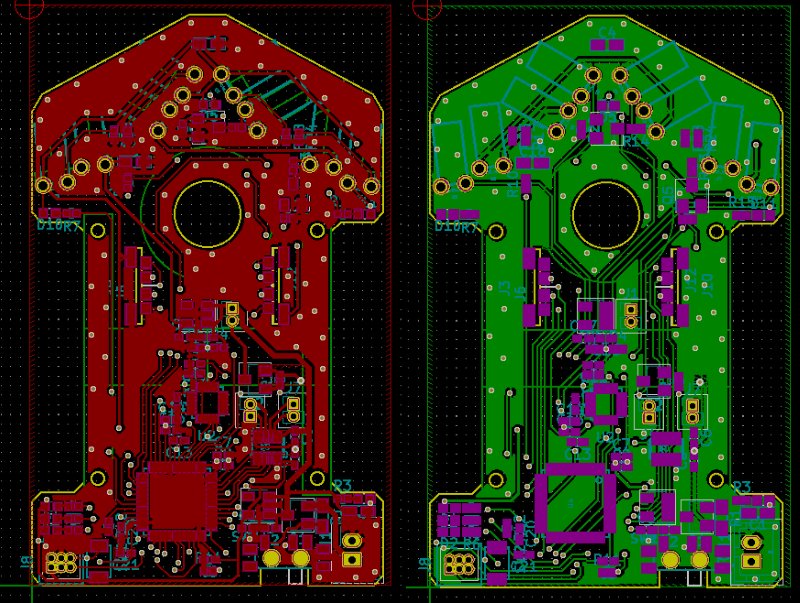
機械設計について
昨年度、磁気式エンコーダに苦しめられたため大きめの磁石であるφ4の磁石を使用しました。設計についてはこの記事の後に公開する予定です。
軽量化のためにモーターマウントの幅を4mm→3mmにしたり、平行ピンの直径を1.5mm * 8mm→1mm * 6mmにしたりと金属の部品をできるだけ小さく軽くなるようにしました。また、マウントの固定にナットを使用せずにねじをマウントに切ることで軽量化を図るということも行っています。
電子回路の設計について
使用するマイコンを64pinから48pinの表面実装のマイコンに変更してマイコンの面積を小さくしました。それ以外は、ほとんど変化はないです。配線の際に、2019年度ではGNDラインが弱いと感じていたためベタGNDを広い範囲で取れるように配線をよくするということを行いました。
マシンスペック
機体のスペックを以下の表にまとめました。
| 機体名 | esV2(仮) |
| 全長 | 60 mm |
| 幅 | 38 mm |
| 高さ | 30mm |
| 重量 | 15.4g |
| マイコン | STM32F411CEU6(48Pin) |
| モーター | φ6mm12mm(アリエクスプレスで購入したモーター) |
| エンコーダ | AS5047P(磁石4mm) |
| センサ | OSI5FU3A11C + LTR-4206E |
| IMU | MPU 6500 |
| モータードライバ | DRV8835 |
| バッテリー | 100mah20C(アリエクスプレスで購入したバッテリー) |
| ギア | kkpmo M0.3 9T 1mm
自作ホイール(DMM アクリル) M0.3 39T |
吸引機構を搭載したうえで重量16gを下回ることに成功しました。バッテリーが3.5g程度あるため、バッテリーがないときは12gフラットくらいです。いい感じの放電力のある小さいリポバッテリーが見つからないため、100mahの大きめのバッテリーを使用しています。大きめのバッテリーを使用することのメリットは32*32の大きい迷路で走らせても2走目以降にそれなりに電池が持つことだと思います。
3Dデータ
アセンブリをしたので、ここに載せておきます。
設計は今までと同様に2次元CADで外形やセンサ配置等の設計をすべて行い、部品を3DCADで作るという感じでやっています。
実物の写真↓

ちゃんと設計通りにできました。
その他
ソフトについて
このブログのSTM32の記事でLLAPIの話をたくさん書かせていただきましたが、HALからLL(一部レジスタ直打ち)に使用するAPIを変更しました。
吸引力について
ハーフサイズの吸引力はどれくらいでるかどうかは、あまり知らないためなんとも言えませんが私のマシンは40g以上吸引が可能のようです。
準備をしたので、ハーフもはかってみた。 pic.twitter.com/YcAC0RQdtp
— そら (@sora_siro1) March 5, 2020
磁気式エンコーダの改善について
ローパスフィルタを一度かけて速度制御を行ったとき以下のようになりました。
ハーフの速度追従のログ。磁気式エンコーダとは思えないぴったり具合。みてびっくりした pic.twitter.com/UM0Yu8nvC6
— そら (@sora_siro1) January 9, 2020
これを見たときに、改善に成功したなぁと強く実感しました。から回しで回転数があがるとぶれが大きくなりますが、以前よりはぶれが小さかったです。
走行動画
この動画では、5秒前半でているかはわかりません。別のパラメータで5秒前半くらいかなと動画を切り取って確認をしました。
ハーフの練習。去年のセミファイナル。5秒前半くらい。精進しなければ。 pic.twitter.com/tXYTDOzhua
— そら (@sora_siro1) February 3, 2020
esの全日本のパラメータよりも早いパラメータです。
さいごに
今年は、個人的なこともありマウスの調整ができる時間があまりないので今現在仕込んであるパラメータよりも早いパラメータを仕込めるかどうかわからないため、宇宙人の速度域を目指すことは厳しいかなと思っています。
コロナウイルスのこともあり、大変な時期ですが体調にお気をつけて生活をしていただければと思います。磁気式エンコーダの記事は少しずつすすんで・・・