STM32 + レジスタをたたいてCAN通信を実装する 最終回 送受信を行う
こんにちは。STM32のレジスタをたたいてCAN通信の実装を行うことの最終回です。
↑前回の記事
Contents
プログラムの実装を行う
送信用の処理
void CAN_TransmitData(CAN_TypeDef* CANx, uint32_t stdid, uint32_t rtr_data,
uint32_t use_id, uint8_t length, uint8_t* tx_data) {
if (length > 8) length = 8;
CAN_TxHeaderTypeDef TxHeader;
uint32_t txMailbox;
TxHeader.StdId = stdid;
TxHeader.RTR = rtr_data;
TxHeader.IDE = use_id;
TxHeader.DLC = length;
TxHeader.TransmitGlobalTime = DISABLE;
CAN_AddTxMessage(CANx, &TxHeader, tx_data, &txMailbox);
while (CAN_GetTxMailboxesFreeLevel(CAN) != 3);
}初期化周りの実装
void CAN_Start(CAN_TypeDef* CANx) {
CLEAR_BIT(CANx->MCR, CAN_MCR_INRQ);
while ((CANx->MSR & CAN_MSR_INAK) != 0);
}
void CAN_Init(void) {
CAN_MspInit();
CAN_Param_Init();
CAN_FilterParam_Init();
CAN_EnableIT(CAN);
CAN_Start(CAN);
}
void CAN_RX0_IRQHandler(void) {
// CAN_RX0_IRQn
CAN_RxHeaderTypeDef RxHeader;
uint8_t RxData[8];
CAN_GetRxMessage(CAN, CAN_RXFIFO0, &RxHeader, RxData);
printf(" id=%ld [0]=%d [1]=%d[2]=%d\r\n", RxHeader.StdId, RxData[0],RxData[1], RxData[2]);
}main
/* USER CODE BEGIN 2 */
uint8_t TxData[8];
uint8_t cnt = 0;
setbuf(stdout, NULL);
printf("start can\r\n");
CAN_Init();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1) {
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
LL_mDelay(100);
TxData[0] = 100;
TxData[1] = 200;
TxData[2] = cnt;
CAN_TransmitData(CAN, 0x456, CAN_RTR_DATA, CAN_ID_STD, 3, TxData);
if (cnt > 250) {
cnt = 0;
} else {
cnt++;
}
}
/* USER CODE END 3 */動作実験
CAN通信の結果を以下に示します。
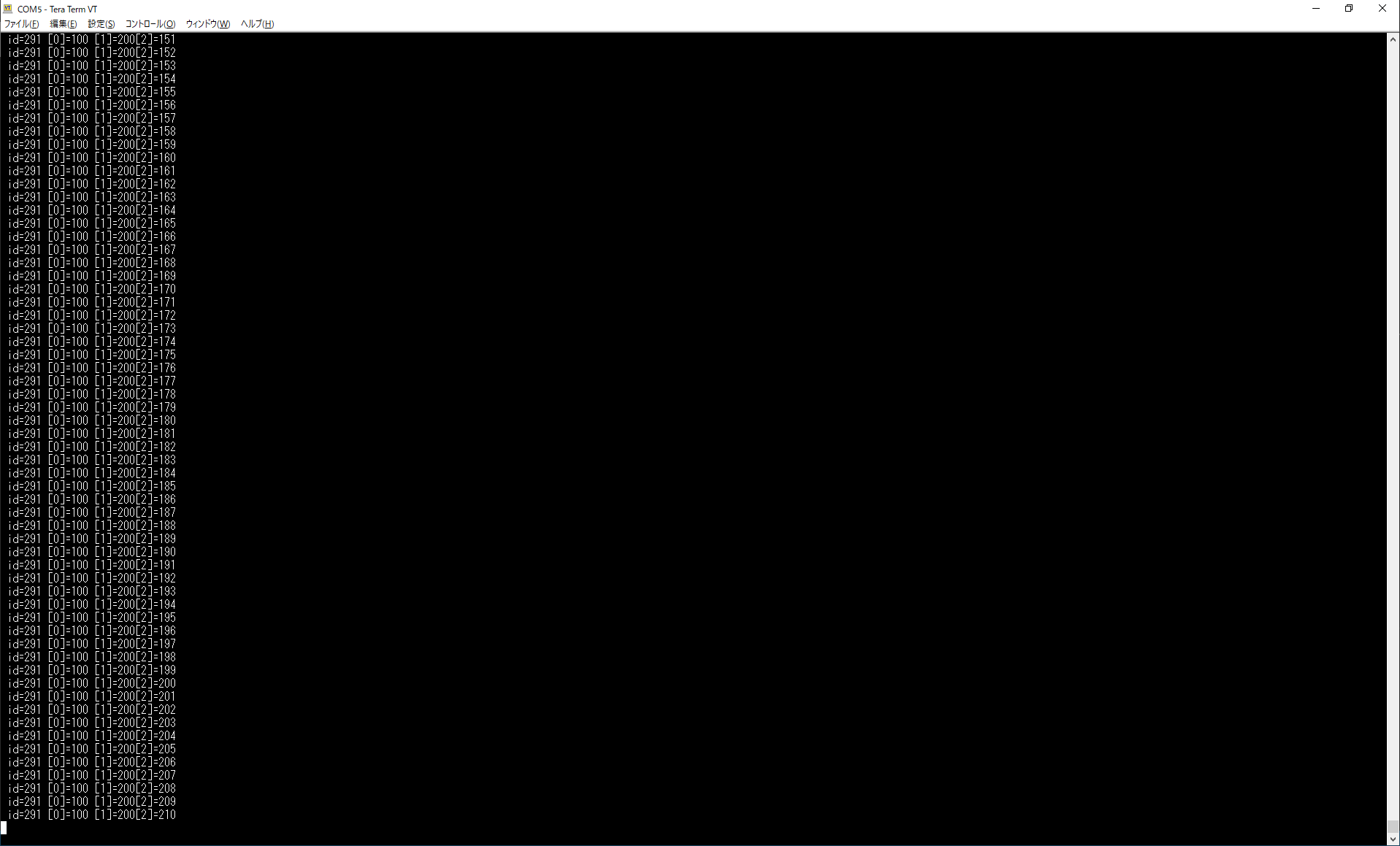
それぞれのマイコンで送信受信を行いました。
さいごに
いままでのまとめだったこともあり、使い方の例を簡単にまとめさせていただきました。他の機能を使いたいときは、リファレンスマニュアルと戯れましょう!
マイコン関連の機能を使う記事では一番長いものになりました。さいごまでお付き合いいただきありがとうございました